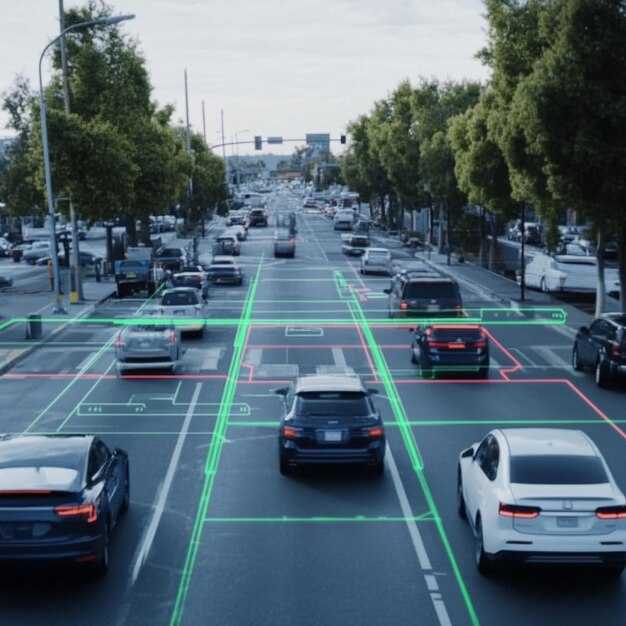
Современные механизмы, позволяющие автомобилям оставаться в пределах заданных полос, обеспечивают безопасность и комфорт в поездках. Технологии основаны на использовании камер, радаров и лидаров для оценки положения транспортного средства относительно разметки на дороге. Эти элементы анализируют полученные данные и передают информацию на бортовой компьютер, который в реальном времени определяет необходимость вмешательства в управление.
Ключевым компонентом таких решений является алгоритм обработки изображений. Он позволяет различать линии разметки и отслеживать положение автомобиля. Многие системы также учитывают погодные условия, что позволяет корректировать работу в условиях дождя или снегопада. Таким образом, эффективность функционирования таких механизмов напрямую зависит от качества данных, поступающих от датчиков, и их анализа.
Пользователи могут улучшить свою безопасность, понимая, как взаимодействовать с такими системами. Регулярное отслеживание состояния системы, а также соблюдение дорожных правил обеспечивают гармоничную работу технологий. Направление движения, скорость и особенности дороги учитываются для достижения оптимального результата в управлении. Постоянное внимание к дорожной ситуации и сотрудничество с системами делает поездки более безопасными.
Принципы работы систем контроля за полосой движения

Технология, обеспечивающая следование транспортных средств по разметке, основана на использовании видеокамер и датчиков. Они фиксируют положение автомобиля относительно линии разметки. С помощью алгоритмов обработки изображения информация анализируется в реальном времени, что позволяет определить, выехал ли автомобиль за пределы своей полосы.
Камеры располагаются в передней части машины и сканируют дорожное покрытие на предмет разметки. Компьютерная система обрабатывает полученные данные, используя методы машинного обучения для повышения точности распознавания разметки в различных дорожных условиях, таких как дождь или заснеженная поверхность.
При обнаружении выхода за границы полосы водитель получает сигнал, чаще всего в виде вибрации в руле, и предупреждение на дисплее. Если на реакцию водителя не последует, в некоторых случаях система может слегка корректировать направление с помощью управления рулевым механизмом.
Сложные модели могут также учитывать скоростные режимы и поворачивающие манёвры, адаптируя свою реакцию в зависимости от ситуации. Многие современные автомобили дополнительно используют системы глобального позиционирования, что позволяет более точно определять местоположение транспортного средства на дороге.
Пользователи должны следить за состоянием оборудования: камеры должны быть чистыми, чтобы обеспечить должную работоспособность. Регулярные проверки системы, а также обновления программного обеспечения помогут поддерживать высокие стандарты безопасности.
Типы сенсоров, используемых в системах

Для обеспечения эффективности мониторинга автомобильных дорожек применяются различные технологические решения. Основные типы сенсоров включают:
- Камеры: Задействуют видеорегистраторы для анализа изображения и определения границ дорожных полос. Используют алгоритмы компьютерного зрения для обработки информации в реальном времени.
- Лидары: Применяют лазерные лучи для создания трехмерной модели окружающей среды. Позволяют точно измерять расстояние до объектов и распознавать линии дорожной разметки.
- Радарные системы: Используют радиоволны для обнаружения объектов вокруг автомобиля. Обеспечивают надежное определение расстояния и скорости движения автомобилей, даже в сложных погодных условиях.
- Ультразвуковые датчики: Применяются для ближнего мониторинга и могут эффективно контролировать расстояние до объектов, препятствующих перемещению.
- Магнитные сенсоры: Оценка положения автомобиля на основании изменения магнитного поля вблизи дорожной разметки. Подходят для совместного использования с другими типами сенсоров.
Каждый из этих элементов выполняет специфическую роль, обеспечивая высокую часть точности и надежности в работе систем, отвечающих за безопасное вождение. Эффективная интеграция различных технологий повышает стабильность и функциональность решения, что исключает возможность возникновения ошибок при езде.
Анализ дорожной разметки и её влияние на работу системы
Контрастность и четкость разметки критично важны для корректной работы комплекса, поддерживающего безопасность в пути. Высококачественная разметка, выполненная с использованием светоотражающих материалов, обеспечивает отличную видимость в условиях недостаточной освещенности. Рекомендуется регулярная оценка состояния линий, так как износ приводит к ухудшению восприятия и соответственно к ошибкам в определении положения транспортного средства на проезжей части.
Ширина линий разметки имеет значение: слишком узкие линии могут не распознаваться датчиками, что снижает надежность бортового программного обеспечения. Оптимальной считается ширина 10-15 см, что позволяет системам точно определять границы между полосами. Важно также учесть наличие и состояние знаков и других указателей, так как их четкость и яркость влияют на общую общую оценку ситуации на дороге.
Неправильная разметка или её отсутствие способствует возникновению ситуации, когда активируются ложные срабатывания. Поэтому необходимо вовремя обновлять разметку и учитывать ее геометрические параметры, такие как углы наклона или радиусы поворота. Для повышения надежности распознавания рекомендуется восстанавливать разметку в соответствии с современными стандартами и технологическими требованиями.
Качество нанесения разметки должно гарантировать минимальные потери износостойкости. Регулярная оценка и тестирование материалов, используемых для нанесения, помогут избежать проблем с видимостью и долговечностью, что напрямую влияет на работу современных помощников. Убедитесь, что разметка соответствует местным нормам и требованиям, так как стандарты могут различаться в разных регионах.
Роль камер в системах контроля за полосой движения
Камеры представляют собой главный инструмент в современных требованиях к соблюдению границ дорожного полотна. Их функциональность включает в себя высококачественную обработку изображений, что позволяет точно определять положение транспортного средства относительно разметки. Для максимальной эффективности рекомендуется применять камеры с высоким разрешением и низкой светочувствительностью, что обеспечивает стабильную работу в любых условиях освещения.
- Определение разметки: Современные алгоритмы распознавания способны выявлять как белые, так и желтые линии, что способствует точному мониторингу.
- Предотвращение выезда: Камеры способны активировать предупреждающие сигналы при отклонении от заданной траектории, что минимизирует риск аварий.
- Адаптация к дорожным условиям: Интеллектуальные системы могут анализировать состояние разметки и идентифицировать участки, требующие дополнительного внимания.
Не менее важным является угол обзора устройства. Широкий угол позволяет получать более полную картину происходящего на дороге. Обработка данных с камер происходит в реальном времени, что обеспечивает моментальную реакцию на изменяющиеся условия. Камеры становятся частью сложных алгоритмов, которые синхронизируются с другими датчиками автомобиля, такими как датчики угла поворота и акселерометры.
- Использование многокамерных систем для охвата большей площади.
- Интеграция с GPS для точного определения местоположения транспортного средства на протяжении всего маршрута.
- Передача данных на панель управления для анализа и оповещения водителя.
Системы, основанные на камерах, значительно увеличивают безопасность вождения, позволяя уменьшить количество ДТП и повысить уверенность водителей на дороге. Правильный выбор и настройка камер играет ключевую роль в достижении желаемых результатов.
Использование радаров для определения положения автомобиля
Радары играют ключевую роль в системе позиционирования транспортных средств, обеспечивая точное определение их местоположения на дороге. Использование миллиметровых волн позволяет осуществлять высокоточное измерение расстояний до окружающих объектов, таких как другие автомобили, дорожные знаки и границы проезжей части.
Современные радары работают на частотах 24 ГГц или 77 ГГц, предоставляя возможность обнаруживать объекты на значительных расстояниях – до 200 метров. Это обеспечивает своевременное предупреждение водителей о возможных опасностях и препятствиях на пути.
Для повышения эффективности используются как передние, так и задние радары. Передние сенсоры фокусируются на оценке положения относительно дорожной разметки, в то время как задние могут фиксировать расстояние до объектов за автомобилем, что предотвращает столкновения при парковке.
Наличие радаров также позволяет системе осуществлять оценку скорости движения транспортного средства в сравнении с другими участниками движения. Это важно для поддержания безопасного расстояния и предотвращения аварий.
Высокая устойчивость к неблагоприятным погодным условиям – еще одно преимущество радарных технологий. В отличие от камер, которые могут давать сбой в условиях дождя или снега, радары сохраняют свою эффективность и точность благодаря способности «проникать» сквозь осадки.
Современные системы интегрируют данные радаров с другими сенсорами, такими как камеры и ультразвуковые устройства, что создает многоуровневое восприятие информации о дорожной ситуации. Это позволяет повысить уровень безопасности и уверенность водителей за счет более четкой картины происходящего вокруг автомобиля.
Алгоритмы обработки данных от сенсоров
Для обеспечения точности и надежности необходимо применять несколько основных алгоритмов. Один из них — фильтрация данных. Используются фильтры Калмана для уменьшения шума и сглаживания значений, поступающих от камер и радаров. Это позволяет повысить стабильность показателей, что критично для последующих этапов.
Классификация может быть проведена с использованием нейронных сетей. Обученные модели анализируют входящие данные, классифицируют их по признакам (разметка полос, автомобили, препятствия), что улучшает интерпретацию информации. Важно следить за объёмами обучающих данных для повышения точности моделей.
Применение алгоритма слияния данных также играет значительную роль. Метод, известный как фильтрация данных по методу МКФ (многосенсорная комбинационная фильтрация), комбинирует информацию с различных источников. Объединение данных от камер, радаров и lidar позволяет получать более полную картину, что уменьшает вероятность ошибок.
| Алгоритм | Описание | Применение |
|---|---|---|
| Фильтрация Калмана | Сглаживание данных, уменьшение шумов | Обработка данных от сенсоров |
| Нейронные сети | Классификация объектов на основе признаков | Анализ изображений с камер |
| МКФ | Комбинирование информации от различных датчиков | Создание единой модели окружения |
Методы обработки изображений также применяются для распознавания дорожной разметки и знаков. Алгоритмы компьютерного зрения извлекают ключевые элементы, которые затем передаются в систему для принятия решений. Использование свёрточных нейронных сетей значительно увеличивает точность распознавания, что критически важно для безопасного вождения.
На завершающем этапе данные анализируются с использованием алгоритмов предсказания. Классические методы, такие как регрессия, позволяют прогнозировать поведение объектов на основе текущих данных, что значительно улучает взаимодействие с окружающей средой и минимизирует вероятность возникновения конфликтных ситуаций.
Взаимодействие систем с другими системами безопасности автомобиля
Критически важно обеспечить интеграцию контроля за положением транспортного средства с другими механизмами обеспечения безопасности. Для достижения максимальной эффективности необходимо, чтобы центральный блок управлял как функцией удержания в полосе, так и системой адаптивного круиз-контроля. Это позволяет автомобилю корректировать скорость в зависимости от дорожной ситуации, предотвращая выход за пределы разметки в случае изменения скорости впереди идущего транспортного средства.
Датчики, отвечающие за мониторинг слепых зон, должны работать совместно с ассистентами защиты при перестроении. Если водитель намеревается сменить полосу и в это время в слепой зоне находится другой автомобиль, система должна предупредить об этом и, в критическом случае, заблокировать попытку смены полосы. Это взаимодействие требует высокой скорости обработки данных и точной калибровки датчиков.
Defensive driving, включающий экстренное торможение, будет более эффективным, если совместить его с контролем за положением в полосе. При анализе маршрута центральный блок может предугадать необходимость резкого замедления, если автомобиль начинает покидать свою полосу. Ранее выявленная угроза позволит обеспечить максимально безопасное торможение.
Совмещение ассистентов парковки с функцией удержания на полосе повышает общую защищенность в процессе маневрирования. При выполнении парковочных операций система может реагировать на приближающиеся объекты сзади, автоматически направляя автомобиль в безопасное положение, предотвращая столкновения.
Настройка освещения, например, с помощью адаптивных фар, направленных в сторону поворота, также влияет на общую безопасность. Корреляция данных между контролем за полосами и системой освещения позволяет оперативно адаптировать направление света, тем самым улучшая видимость и снижая вероятность возникновения аварийных ситуаций в ночное время или в условиях плохой видимости.
Комплексное использование этих подходов требует тщательной настройки и интеграции всех компонентов, что требует от производителей постоянного совершенствования технологий и доступных решений. Важно уделить внимание как программному обеспечению, так и аппаратным средствам, чтобы обеспечить высокую степень согласованности всех систем.
Проблемы, возникающие при работе в условиях плохой видимости
Необходимо учитывать, что ухудшенные погодные условия, такие как дождь, снег или туман, могут привести к снижению эффективности функционирования технологических решений, направленных на поддержание корректного движения по дорожной разметке.
Оптические сенсоры, используемые для определения границ полос, сталкиваются с проблемой сниженной видимости, особенно при наличии грязи на стеклах или искажении изображения из-за капель воды. Альтернативные методы, такие как использование радаров, могут частично нивелировать эту трудность, но они также могут испытывать затруднения при работе в условиях сильного дождя или снега.
Кроме того, система может не распознавать дорожные разметки, если они замаскированы под снегом или мокрым асфальтом. В таких ситуациях вероятность ложных срабатываний возрастает, что может отвлечь водителя от управления. Поэтому рекомендуется дополнительно использовать визуальные указатели, которые помогут обеспечить безопасную навигацию.
| Проблема | Рекомендация |
|---|---|
| Плохая видимость из-за осадков | Регулярно очищать стекло и использовать дворники на максимальной скорости |
| Ложные оповещения о выезде за границы полос | Включить систему автономного управления только при хороших погодных условиях |
| Отсутствие четкой разметки | Обращать внимание на дорожные знаки и другие визуальные ориентиры |
Дополнительная информация по данному вопросу доступна на сайте r7kk.ru.
Ограничения современных технологий контроля за полосой движения
Современные средства обнаружения границ дорожных полей имеют ограничения, которые необходимо учитывать. К основным из них относятся:
- Неполное распознавание разметки: Размеченные линии могут быть закрашены или испорчены, что затрудняет обнаружение.
- Метеоусловия: Дождь, снег или туман значительно ухудшают видимость и работу сенсоров.
- Разнообразие дорожных условий: Разные регионы имеют собственные чёрты разметки, что может быть сложно для алгоритмов.
- Проблемы с совместимостью: Использование различных стандартов создания разметки затрудняет интерпретацию для систем.
- Ограничение на скорость: Высокая скорость транспортного средства может затруднить точное определение контуров.
Для минимизации влияния этих недостатков рекомендуется:
- Использовать совместимые технологии с учетом местных норм.
- Обновлять программное обеспечение, чтобы поддерживать актуальные алгоритмы распознавания.
- Интегрировать системы с дополнительными датчиками, такими как радары и камеры для расширенного восприятия.
- Проводить тестирование в различных условиях для обеспечения надежной работы.
Будущее технологий контроля за полосой движения
Анализ текущих тенденций показывает, что в недалеком будущем основное внимание будет уделено интеграции искусственного интеллекта и машинного обучения для повышения точности определения границ передвижения. Автопроизводители сосредоточатся на создании системы, способной предсказывать поведение водителя и корректировать его действия в реальном времени.
С учетом перспективных разработок, стоит ожидать значительное снижение числа ДТП за счет внедрения камер нового поколения и радарных систем, работающих на дальних расстояниях. Для повышения надежности системы будут применяться алгоритмы, анализирующие данные с нескольких источников: GPS, ассистенты дальнего действия, а также информация о погоде и состоянии дороги.
Персонализация решений составит важную часть будущего. Начиная с дебюта моделей, каждая машина сможет адаптировать контуры безопасности под стиль вождения конкретного пользователя, учитывая его привычки и предпочтения в режиме реального времени.
| Технология | Описание |
|---|---|
| Искусственный интеллект | Анализ данных для предсказания поведения водителя. |
| Камеры нового поколения | Оптимизация распознавания границ передвижения. |
| Радарные системы | Работа на дальних расстояниях для повышения точности. |
| Персонализация | Адаптация решений под индивидуальные предпочтения. |
Также ожидается совместимость с инфраструктурой. Обмен данными с дорожными знаками и светофорами поможет минимизировать риски и улучшить коммуникацию между транспортными средствами и окружающей средой. Технологии V2X (Vehicle-to-Everything) начнут активно использоваться, что позволит сообщать о препятствиях и изменениях в движении.
Необходимость внедрения кибербезопасности возрастает. С ростом количества сцепленных устройств риск атак также увеличивается, что потребует от разработчиков инновационных решений для защиты данных водителей и транспортных средств от злоумышленников.
Требования к системе для сертификации и стандартам безопасности
Системы, отвечающие за определение границ дорожного полотна, должны соответствовать нормативным актам, регулирующим безопасность транспортных средств. Основные требования включают обязательное соответствие стандартам ISO 26262, регулирующим функциональную безопасность. Это подразумевает наличие четкой методологии оценки рисков и анализа потенциальных отказов.
Ключевым аспектом является работа с данными. Эти механизмы должны обладать высокой точностью определения положения автомобиля относительно линии разметки, что требует интеграции с высококачественными сенсорами и алгоритмами обработки информации. Допускаемое значение отклонений не должно превышать 5 см от реального положения.
Эффективное программное обеспечение должно проходить испытания на устойчивость к сбоям. Это включает в себя тестирование в различных климатических условиях и мониторинг работы системы при наличии помех, таких как дождь или снег. Система должна сохранять работоспособность при различных скоростях, включая низкие и высокие режимы.
Важно также наличие системы оповещения водителя в случае обнаружения отклонения от курса. Эта функция должна быть реализована с помощью визуальных и аудиосигналов. Время реакции должно составлять не более 1 секунды для минимизации риска возникновения аварийных ситуаций.
Спецификации требуют также регулярного обновления программного обеспечения для обеспечения совместимости с новыми дорожными знаками и изменениями в разметке. Автоматизированная система диагностики позволяет выявлять сбои и необходимый уровень обслуживания во время эксплуатации.
Устранение неисправностей в системах контроля за полосой движения

Проверка камер: убедитесь, что объективы чистые и не имеют повреждений. Регулярная чистка поможет избежать искажений и некорректной работы.
Калибровка датчиков: необходима точная настройка сенсоров для корректного восприятия разметки дороги. Проверьте параметры в меню настройки.
Обновление программного обеспечения: наличие актуальной версии ПО может устранить многие сбои. Рекомендуется периодически проверять наличие обновлений.
Проверка подключения: осмотрите проводку и разъемы на наличие повреждений. Неплотные соединения могут вызывать сбои в работе системы.
- Состояние дверей и окон: убедитесь, что все двери и окна закрыты. Некоторые модели могут отключать систему при открытых дверях.
- Работа других систем: проверьте взаимодействие с контрольной электроникой автомобиля, так как сбои могут быть связаны с другими модулями.
- Температурный режим: следите за перегревом устройства. Высокие температуры могут вызывать временные сбои.
Применение диагностического оборудования позволяет точно определить источник проблемы. Используйте сканеры для считывания кодов ошибок и обработки информации из ЭБУ.
Если описанные действия не привели к исправлению проблемы, обратитесь к специалистам на СТО с опытом работы с подобными устройствами.





